1. Questions
Safe and functional cycling infrastructure is necessary to support the uptake of cycling in cities (Winters, Buehler, and Götschi 2017). Especially street intersections are important conflict points where cars and bicycles meet, causing a large fraction of road deaths and injuries (Götschi et al. 2018; Dozza and Werneke 2014; Ling et al. 2020; Bahrololoom, Young, and Logan 2020), and must therefore be planned with human behavior in mind. The intersection at Dybbølsbro, Copenhagen, is a notorious example which has been criticized for confusing cyclists due to its difficulty to navigate, and is currently scheduled for a second major redesign (Hunter 2021; Therkildsen 2021; WSP DANMARK A/S 2021). To understand to which extent intersection designs are adequate for cyclists, some studies have begun tracing and recording cyclist trajectories and behavior (Colville-Andersen et al. 2013; te Brömmelstroet 2014; Lind, Honey-Rosés, and Corbera 2020; Nabavi Niaki, Saunier, and Miranda-Moreno 2019; Casello et al. 2017). However, these methods are manual, therefore costly and not scalable.
Here we first ask: How can we use computational methods to automatize the analysis of cyclist trajectories? Focusing on Dybbølsbro, we then ask: How much do cyclist trajectories deviate from the design’s intended paths and why? Finally: What are the implications for the design of the Dybbølsbro intersection and of Danish intersections in general?
2. Methods
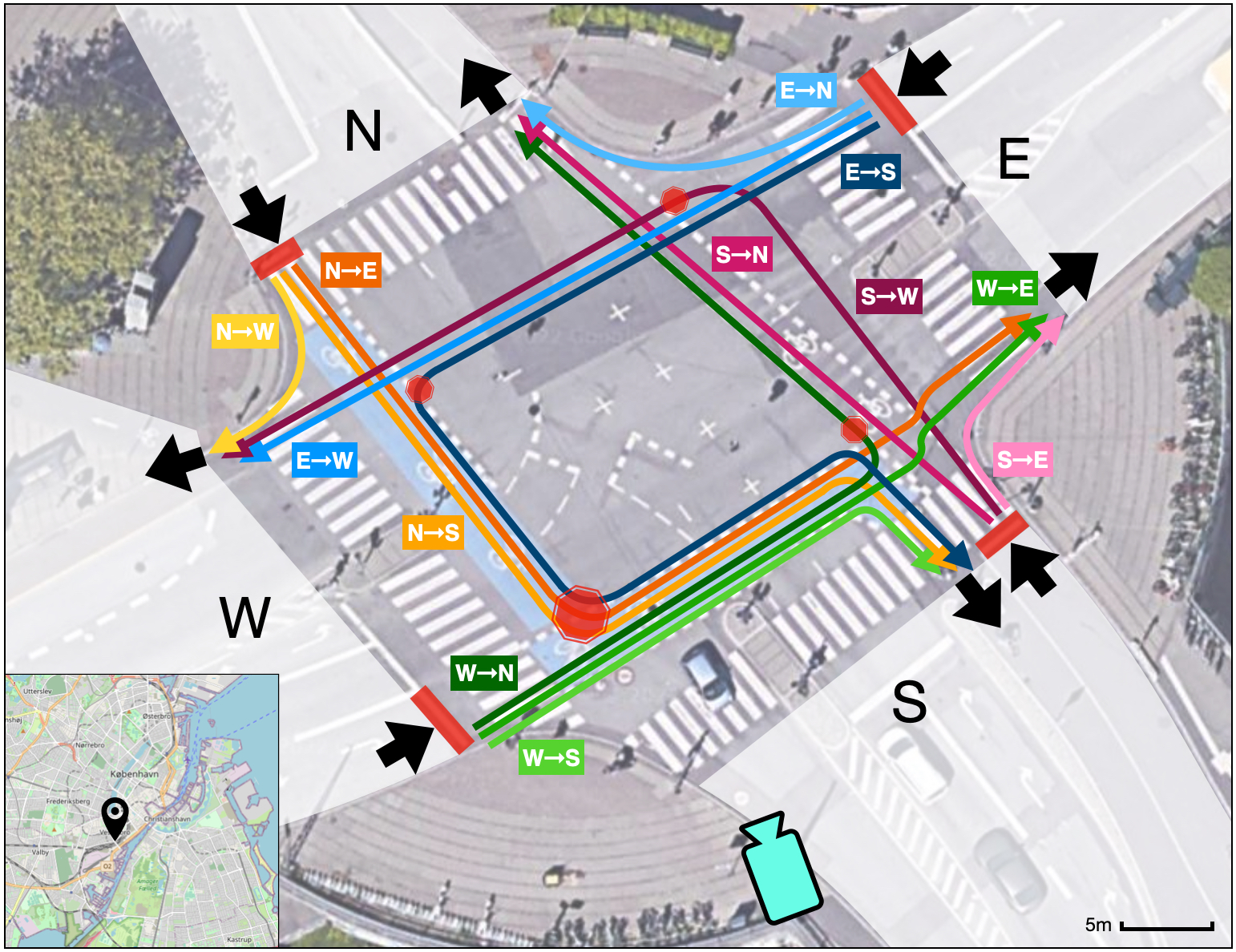
All data and code to reproduce our findings are available at: github.com/SimonBreum/desirelines Our starting point is a set of 11,553 cyclist trajectories, which had been extracted via custom-trained YOLOv5 model (see Supplementary Information Section S1) from a high-resolution 1h video from 2021-06-09 07:00-08:00 (Wednesday) of the Dybbølsbro intersection, see Fig. 1 This intersection has been redesigned in 2019 with a bidirectional bicycle track on the south side (S), which has made it difficult for cyclists to navigate due to the need to switch sides when coming from north (N) (WSP DANMARK A/S 2021). See Fig. 1 for all possible designed paths (simplifying one additional street in the northwest). Apart from the unconventional path, the left turns S require one additional stop, and the left turn requires two, due to general Danish intersection design (the “Copenhagen left”) (Larsen and Funk 2017).
.jpg)
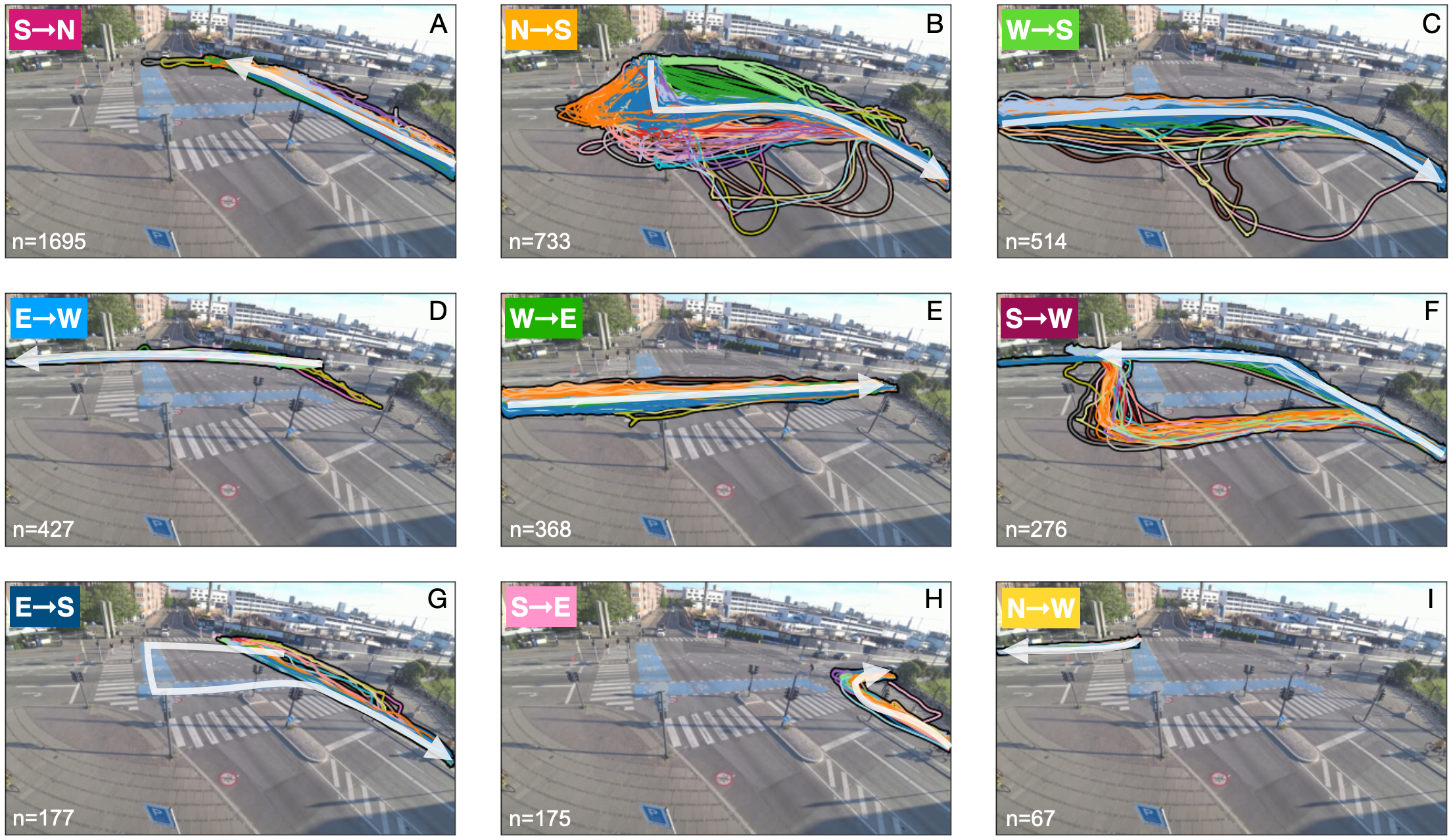
We applied DBSCAN to origin-destination pairs with pixels (at a resolution) and which yielded 4888 trajectories distributed among 16 origin-destination (OD) clusters. We discarded the remaining 6665 trajectories which are mostly broken trajectories, for example due to occlusion by traffic signs or vehicles. After manual inspection we merged two pairs of OD-clusters that each had the same origin and destination. We also discarded three other clusters of broken trajectories. In total this yielded 9 OD-clusters with 4432 trajectories, see Fig. 2, matching the 12 possible designed paths from Fig. 1 except for and where not enough trajectories were found.
_pairs_by_the_cyclists__which_yields_12_od-clus.jpg)
To each of the OD-clusters we applied dynamic time warping (see Supplementary Information Section S2), generating 20 additional path-clusters respectively, denoted by different trajectory colors in Fig. 2. Finally, we contrasted these path-clusters with the designed paths to study how cyclists are actually moving from each origin to each destination versus how it was intended by the planners.
3. Findings
We found that at least 11% (495 out of 4432) trajectories are not following the designed paths. The effect is particularly strong in two specific OD-clusters:
-
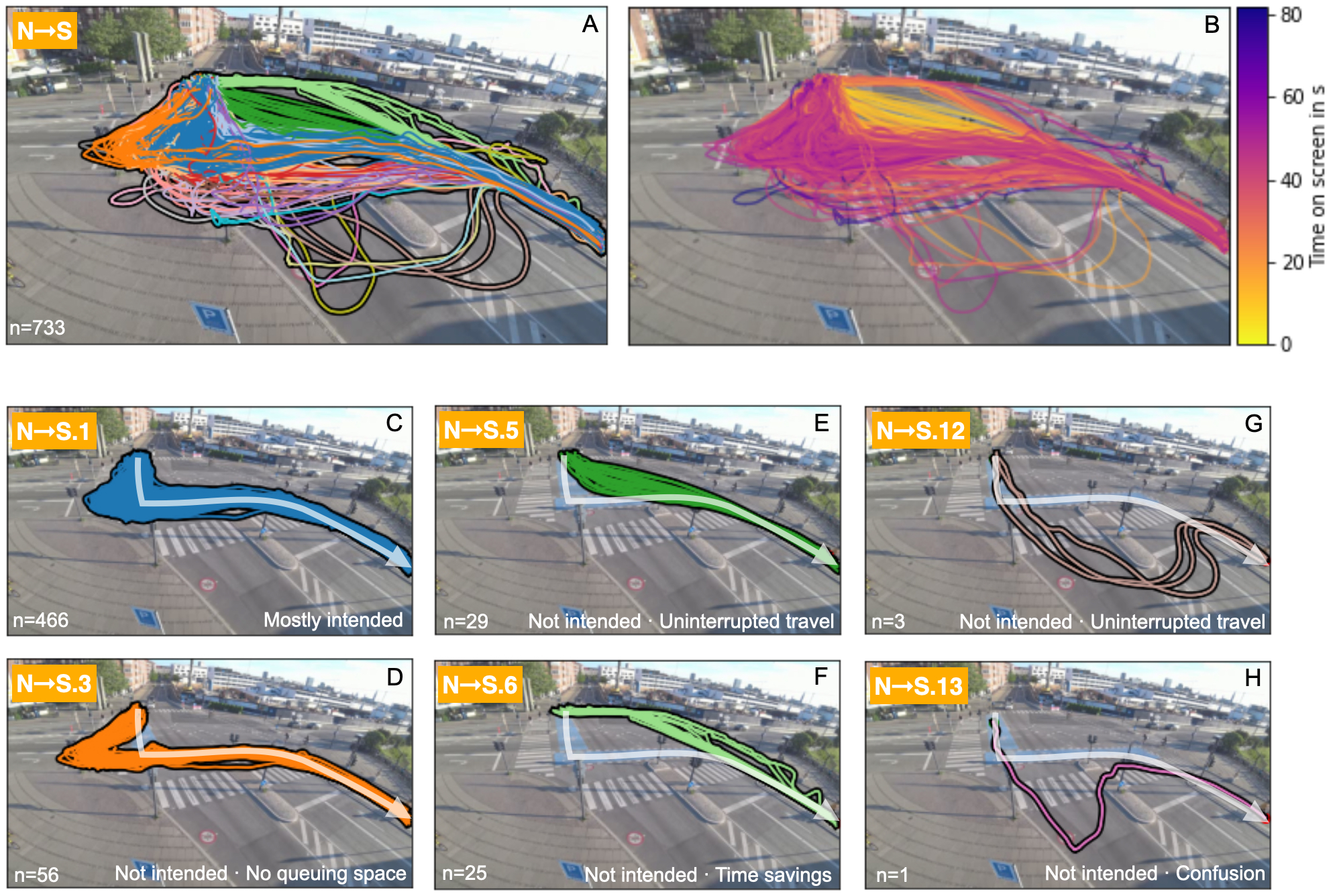
OD-cluster NS (Fig. 3). Path-cluster (Fig. 3C): Only 466 out of 733 cyclists follow mostly intended behavior, implying a mismatch between design and reality of at least 36%. Path-cluster (Fig. 3D): Due to lack of queuing space, many cyclists cannot wait in front of the pedestrian crossing but are forced to enter it. Path-cluster (Fig. 3F): 29 cyclists crossed the intersection diagonally. Path-cluster (Fig. 3E): 25 cyclists crossed via the NE corner instead of the SW corner. Analysis of trajectory durations reveals the likely cause (Fig. 3B): On average, diagonally crossing cyclists spend only 13s, and cyclists crossing via the NE corner spend 32s. Contrast these values to 43s, which is the time spent by cyclists who follow the designed path with the additional stop. Further path-clusters (Fig. 3G,H): Uninterrupted, fast travel (3 cyclists), and confusion (1 cyclist).
-
OD-cluster ES. Here we found 0 out of 177 empirical trajectories following the intended path, implying a mismatch between design and reality of 100%, explainable with the two additional stops that are considerably more convoluted than the direct path, Fig. 2G. To double-check, we selected from all 11,553 trajectories those going irrespective of clustering, and found 9 out of 518 taking the two additional stops, lowering the mismatch to 98%.

Apart from OD-cluster-specific issues, we also counted 12 trajectories from several OD-clusters that enter the wrong – vehicles-only – side on the southern street like in Fig. 3G,H. Although the fraction of these trajectories is small, they represent potentially dangerous situations where cyclists are traversing three vehicular lanes.
We have shown that our mostly automated method can well support the behavioral analysis of a large number of cyclists, and it has quantified a non-negligible number of at least 495 not intended, potentially life-threatening trajectories – all happening in just one hour. It is an open question whether our method can be generalized and fully automatized, and how the quality of analysis compares to manual methods. In the future, every step of our computational pipeline should be scrutinized to ensure high trajectory quality. In particular, bias could have been introduced by lost trajectories from occlusion or tracking errors in specific parts of the study area. In any case, we expect our method to scale better and to be less costly.
For the upcoming re-design of the Dybbølsbro intersection, consultants have considered traffic counts from video analysis and qualitative assessment of behavior, but without quantifying desire lines (WSP DANMARK A/S 2021). A repeated evaluation with our method after implementation could provide an assessment of the re-design’s success rate, and whether a more profound analysis or re-design is called for. Our results confirm the intentions of the re-design (WSP DANMARK A/S 2021) that intersection complexity should be lowered and the momentum and smooth wayfinding for cyclists should be respected, as also found in previous research from Spain (Lind, Honey-Rosés, and Corbera 2020), the Netherlands (Hahn and te Brömmelstroet 2021), Canada (Nabavi Niaki, Saunier, and Miranda-Moreno 2019), and Denmark (Colville-Andersen et al. 2013). However, the mixing of a bidirectional lane with unidirectional lanes remains particularly problematic (Lind, Honey-Rosés, and Corbera 2020), as does the lack of queuing space and protection for cyclists (Gemeente Amsterdam 2018; NACTO 2014).
The underlying issue is the prioritization of vehicular traffic flow in Danish street design, which persists despite successful efforts at improving cycling (Nielsen, Skov-Petersen, and Agervig Carstensen 2013; Colville-Andersen 2017; Colville-Andersen et al. 2013; Szell 2018). As we have shown, this priority leads to additional interruptions for cyclists, forcing traffic violations and competition with pedestrian space. Due to the skewed threat posed by vehicular traffic (Verkade and te Brömmelstroet 2019; Klanjčić et al. 2022), such violations are most hazardous to the cyclists themselves. Following research and best practices in road safety (Aldred et al. 2018; Marshall and Ferenchak 2019; Hartmann and Abel 2020; Branion-Calles et al. 2020; Nieuwenhuijsen 2020; WHO 2022), the acceptable level of vehicular traffic flow should be well justified. If this level is above zero, known effective solutions can include transformation of vehicular space into more queuing space, drastic speed reductions with possible removal of traffic lights, or similar improvements (Hahn and te Brömmelstroet 2021; NACTO 2014; Gemeente Amsterdam 2018). However, such considerations are not part of the upcoming re-design where car traffic cannot be obstructed (WSP DANMARK A/S 2021). It is an open research question why that is the case (Mattioli et al. 2020; Gössling 2020), given the projected increase of cycling (WSP DANMARK A/S 2021), and that the private car is the most hazardous (Cantuaria et al. 2021; Klanjčić et al. 2022), unsustainable (Banister 2005), and societally uneconomic (Gössling et al. 2019) mode of urban transport.
Acknowledgments
This study was supported by the Danish Ministry of Transport. We thank RAW Mobility for video capture, the NERDS group (especially Ane Rahbek Vierø and Anastassia Vybornova) and Marco te Brömmelstroet for helpful discussions, and ITU’s HPC for computational support.