

1. Questions
Shared automated vehicles (SAVs) are expected to draw users from all modes, including traditional transit systems (Huang, Kockelman, and Truong 2021; Haboucha, Ishaq, and Shiftan 2017). SAV-based systems are likely to be far more demand responsive (including door-to-door) and physically nimble when stopping to pickup and dropoff passengers, relative to standard buses, thanks to smaller sizes. Without a human driver and with lower crash rates, they can be far more cost-effective than traditional transit, as the technology matures (U.S. Department of Transportation 2018b; Loeb and Kockelman 2019). While various surveys (Etzioni et al. 2021; Gurumurthy and Kockelman 2020) predict SAVs’ future market penetration, actual traffic conditions and total system costs are missing, for this kind of new “transit” service.
2. Methods
This work specifies detailed behaviors of human-driven cars or “background vehicles”, SAVs, and SAV users using Simulation of Urban Mobility (SUMO) software for a suite of detailed outputs, every half-second. All vehicles and riders share a straight one-way 2-lane, 6.4-kilometer (4-mile) corridor with a speed limit of 48 km/hr (30 miles/hr). During the 2-hour simulation period, both SAVs and background vehicles traverse the entire 6.4-kilometer corridor while riders use SAV services for 1.6-kilometer (1-mile) trips in the corridor. Uniformly generated at random positions along the corridor, riders walk to the nearest stop, take the next available SAV and alight at stops closest to their final destinations. If riders are waiting or have almost arrived at a stop, or there are onboard riders who plan to alight, SAVs must stop and then dwell at those locations, which are evenly placed every 0.4 kilometers (quarter mile), in the mid-point of each 0.4-kilometer road segment (Figure 1). The detailed simulation flow is shown in Figure 2. The TraCI Python module was used to ensure real-time control of vehicles and travelers. Each scenario required about 5 to 60 minutes of run-time, depending on SAV penetration rates.


This simulation uses 10-seat SAVs, which is a common SAV size for public AV demonstrations (U.S. Department of Transportation 2018a). Vehicle behavior and configurations are shown in Table 1. 4-seater, 6-seater, 20-seater and even 40-seater AVs (with some pasengers also standing) are possible as well, with different cost, service frequency, and traffic implications (Huang, Kockelman, and Truong 2021). Different SAV penetration rates are specified here, as different shares from a fixed 19,312 person-kilometers traveled (PKT) (12,000 person-miles traveled) background demand. Travelers shifting from privately owned or used vehicles to SAVs with dynamic ride-sharing (DRS) en route still results in the same 19,312 total PKT, in the corridor, as each of the private-vehicle occupants or drivers (for a 6.4-kilometer total-corridor trip) results in 4 separate 1.6-kilometer (1-mile) trips in the SAVs. More boardings and alightings will add more complexity and congestion delays to the corridor, but may still beat the private car rides, thanks to higher vehicle occupancies in 10-seat SAVs. Here, SAVs are dispatched to provide 1.5 times the PKT demanded of them, in order to deliver an average load factor of 2/3 (or 6.7 seats occupied on average, in 10-seat SAVs).
Background vehicles are assumed to have an average vehicle occupancy (AVO) of 1.2 persons (U.S. Department of Transportation 2017) and values of travel time (VOTT) for drivers and passengers in these private vehicles are $15 and and $7.50 per person-hour, respectively. SAV riders are assumed to have a high VOTT ($30 per person-hour) while waiting at stops, but just $7.50 per person-hour once they are on board (Liu et al. 2017; Fan, Guthrie, and Levinson 2016). Background vehicles are assumed to have ownership and operating costs of $0.36 per kilometer (AAA 2020) plus a $3 parking fee at their destination, paid by each vehicle’s users or subsidized by the establishment providing the parking space (Litman 2012). Considering ownership and operating costs, 10-seat SAVs are assumed to cost $0.68 per kilometer driven (Bösch et al. 2018). Finally, SAVs are assumed to stop in the outside lane of this 2-lane (one-way) corridor, so they create congestion every time they stop. For other vehicle sizes and corridor designs, please see Huang, Kockelman, and Truong (2021).
3. Findings
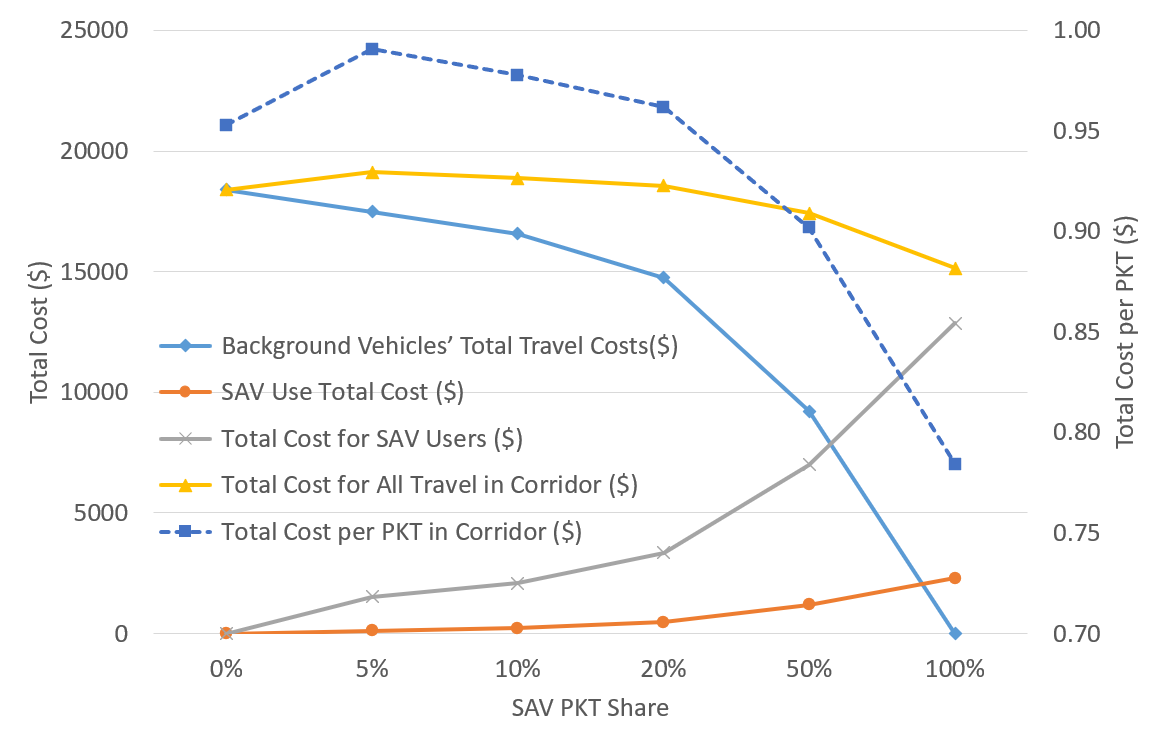
Table 2 shows the results of the 2-hour peak-period simulations. As travelers shift from private vehicles to SAVs, the background vehicles’ user costs fall and SAV system costs rise, but not per traveler. The total cost per PKT also rises, as SAV PKT share rises, at first. It peaks quickly, at approximately a 5% SAV-choice penetration rate. When the SAV PKT share reaches 20%, total travel costs in the corridor fall to the 100% private-vehicle (zero SAVs) scenario’s cost. These results suggest that roadway systems may benefit from 10-seat SAVs at mode splits higher than 20%. Of course, if private vehicles are also driven “autonomously”, their drivers’ VOTT will fall. But, if we include the true costs of private vehicles accessing the corridor as short trips, the way the SAV users are assumed to, the breakpoint favoring SAVs may happen much earlier.
In the extreme case, when all travelers are served by SAVs (and other, non-motorized modes, for example), total cost falls to $0.78 per PKT, which is 18% less than the “business as usual” (100% private vehicles) scenario. Importantly, only 520 SAV trips are needed along the corridor during the 2-hr simulation, lowering total vehicle footprints by about 80%, which is dramatic.

The corridor may experience slower traffic than simulated because the human-driven vehicles will create congestion when entering, exiting and stopping along the corridor, and may crash more often. Therefore, shifting to SAVs may bring more benefits than estimated here. But fixed-route SAVs service may not be accessible for everyone, because of walking (access) distances to access the stop or people with travel limitations who still need door-to-door service. Constructing dedicated lanes for SAV stops can improve operational effiency and safety (by interrupting fewer background vehicles), but would cost more (for right of way and construction). Related to this, the cost analysis would be more comprehensive if external cost were included, such as emissions, collisions, and noise.
Overall, this analysis suggests that cities and corridors will benefit from higher SAV penetration rates, even with more short trips, and many stops along the way. Transit agencies using SAVs to serve fixed-route transit corridors can save society money, while dramatically reducing vehicles’ footprints, thereby freeing up pavement for other uses. Of course, incentives to ensure such mode splits (like congestion pricing of corridors, transit use subsidies, and higher gas taxes in undertaxed nations like the U.S.) will also be needed, to get the mode splits to shift so much from current conditions in many settings. Fortunately, smart, connected (to cellular) vehicles will have such capability, and conventional vehicles can be upgraded now for 5G-based pricing.
Acknowledgments
The authors thank Jade (Maizy) Jeong for her excellent editing and submission support.