1. QUESTIONS
The growing popularity of e-scooters has introduced various challenges in urban settings. Their use often results in sidewalk blockages, posing risks to pedestrians, especially those with disabilities (Brown et al. 2020; Sandt, Transportation Research Board, and National Academies of Sciences, Engineering, and Medicine 2022). Sidewalk riding further escalates conflicts due to unpredictable movements and the lack of dedicated infrastructure (James et al. 2019; Ma et al. 2021).
Existing regulatory measures, such as geofencing, face limitations in dense urban environments, where tall buildings cause GPS distortions (Sandt, Transportation Research Board, and National Academies of Sciences, Engineering, and Medicine 2022). Additionally, the narrow width of sidewalks makes it impractical to use geofencing to prevent sidewalk riding, as mistakenly identifying a rider as being on the sidewalk when they’re actually on the street or in a bike lane could lead to unnecessary limitations on their movement (Hendawi et al. 2019).
This study evaluates a new approach: an AI-based camera system that detects riding surfaces in real-time and provides auditory feedback alongside speed restrictions without relying on GPS. The key question is whether, and to what extent, this AI technology increases compliance with laws prohibiting sidewalk riding.
2. METHODS
This study evaluated an intervention to reduce sidewalk riding among e-scooter users in Santa Monica, California. Spin’s shared e-scooters were equipped with a camera-based AI system that used computer vision algorithms to detect riding surfaces (sidewalk, street (roadway), or bike lane). The system recorded events whenever a change in riding surface occurred.
When the AI system detected sidewalk riding, it provided feedback to the rider through in-app notifications, audible beeps, and speed reduction. Starting on November 23, 2022, 50 of the 100 AI-equipped e-scooters were randomly selected to have their feedback mechanisms disabled, while the other 50 continued as before. Riders were unaware of the scooter’s feedback status, ensuring random assignment to either group. Data was collected until February 14, 2023, resulting in 456 trips for analysis—289 with feedback-enabled scooters and 167 with feedback-disabled scooters. These trips were made across various neighborhoods within Santa Monica, which includes a mix of bike lanes, sidewalks, and pedestrian-only streets, ensuring that riders encountered diverse but consistent infrastructure types. We did not interfere with the parked locations of these e-scooters, as they were freely moved by users and could end up anywhere.
The distances between consecutive events were calculated using the OSMnx package to estimate the network’s shortest path, approximating the riders’ actual routes. For each trip, the fractions of time and distance spent on each surface were computed. To further assess the impact of the intervention, we evaluated the time and distance spent on each surface at the event level (i.e., how long and how much distance the rider continuously traveled on each surface type). These results are presented in the appendix.
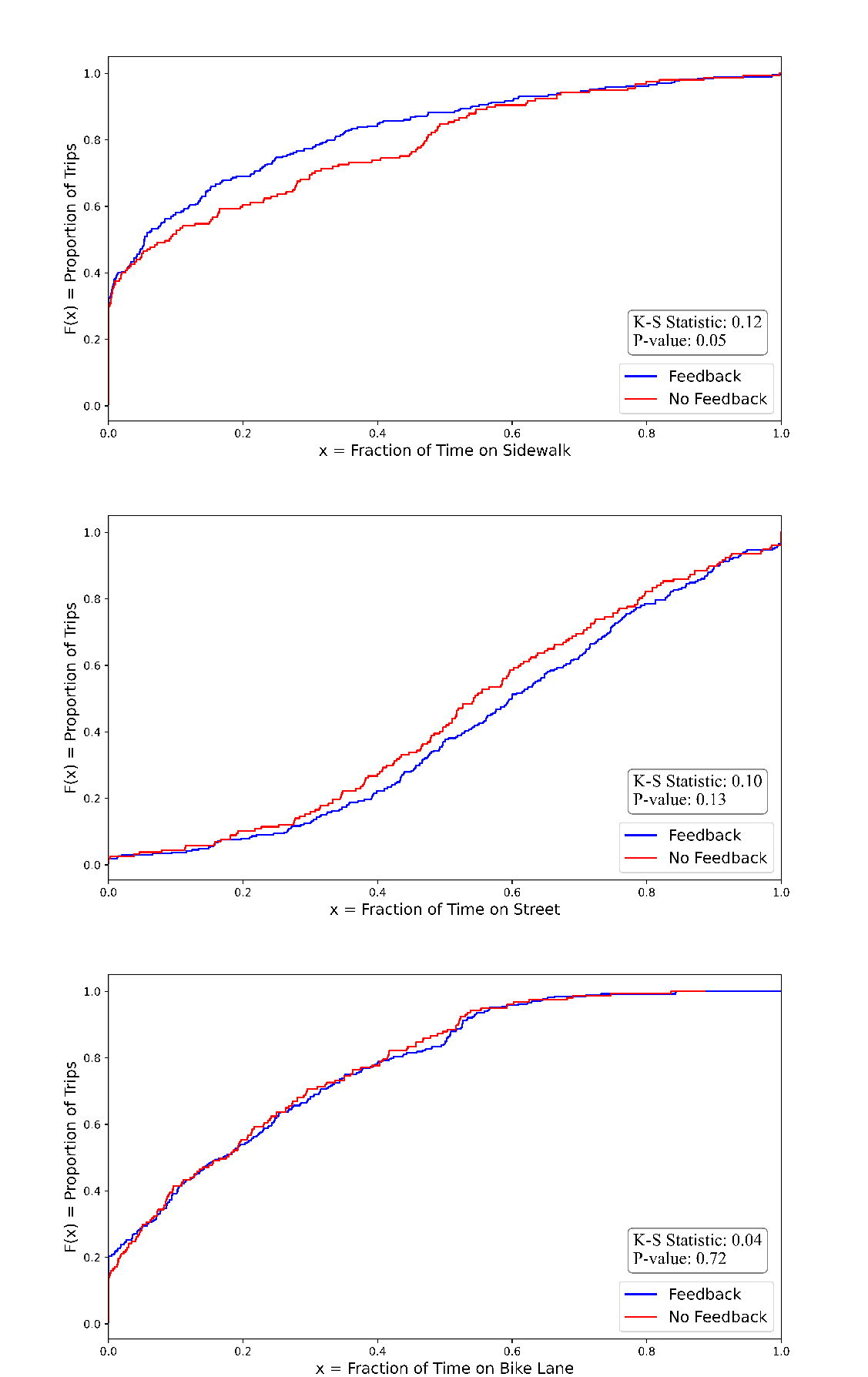
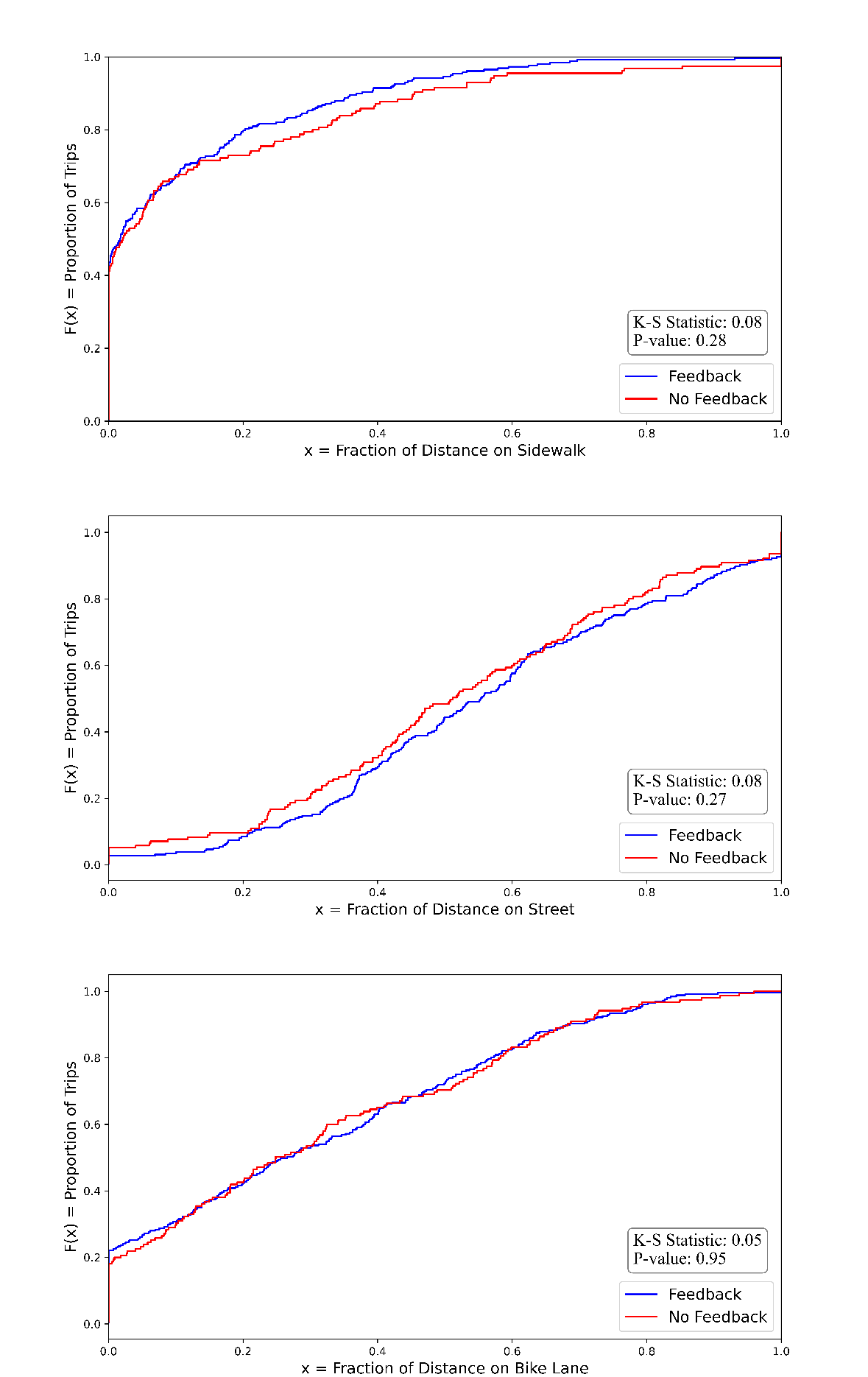
Empirical cumulative distribution functions (ECDFs) were plotted to visualize the distributions of trip-level variables for both groups. The Kolmogorov-Smirnov (K-S) test assessed differences between these distributions. Additionally, a binary logistic regression model examined the relationship between using a feedback-enabled scooter and the likelihood of selecting the sidewalk as the next riding surface in the same trip.
3. FINDINGS
According to Table 1, the feedback group spent 22% less time and 20% less distance on sidewalks than the no-feedback group. They spent 5% more time on the streets, though the 6% increase in street distance was not statistically significant. Most trips occurred on sidewalks and streets, with minimal difference in bike lane usage between the groups.
The ECDF analysis in Figures 1 and 2 shows that nearly half of the riders use sidewalks for less than 10% of their trip time, even without feedback. Conversely, around 10% of trips spent over 60% of their time on sidewalks, a pattern consistent regardless of feedback. Approximately 40% of the trips in the feedback group showed a 10% reduction in sidewalk usage compared to the no-feedback group. However, e-scooter trips often begin or end on sidewalks for parking, making complete avoidance difficult.


State transition matrices in Table 2 and logistic regression results (in the appendix) suggest feedback reduces street-to-sidewalk transitions significantly but not bike lane-to-sidewalk. This could be due to the smaller number of transitions starting from bike lanes. Additionally, despite previous studies indicating a preference for bike lanes, our study found underutilization of these lanes, suggesting a need for further research into riders’ choices and the availability of bike lanes.
Results suggest that implementing AI-based feedback on e-scooters can effectively reduce sidewalk riding, thus mitigating pedestrian-scooter conflicts and enhancing compliance with urban mobility regulations. Moreover, policies could be crafted to allow e-scooter access to sidewalks in high-traffic areas under strict speed limits, addressing safety concerns when alternative infrastructure is inadequate.
Our study faced several limitations that hindered data collection and analysis. A significant challenge was the absence of complete e-scooter trajectory data, which would have facilitated spatial analysis to identify hotspots of sidewalk usage. This data gap was exacerbated by practical obstacles, notably the targeted theft of camera-equipped e-scooters. In response, Spin withdrew all such scooters from operation, resulting in a reduction of recorded trips and potentially diminishing the statistical robustness of our findings. The issue of theft underscores the need for further investigation into the security implications of installing cameras on e-scooters.
Acknowledgements
The work was supported by the U.S. Department of Transportation (DOT) via Connected Cities for Smart Mobility towards Accessible and Resilient Transportation (C2SMART) Center awarded by the U.S. Department of Transportation under contract 69A3551747119.