1. Questions
Urban arterials play a crucial role in shaping traffic flow in metropolitan areas, acting as connectors between high-speed highways and local streets (Arias et al. 2021). While designed for speed and capacity, these roads often compromise pedestrian safety and comfort (Gitelman et al. 2017; Golakiya, Patkar, and Dhamaniya 2019). Although some research has addressed pedestrian safety on urban arterials, gaps remain regarding the effects of land use, driveways, and streetscape environments. This study focuses on the relationship between road geometry, land uses, driveways, and streetscapes and pedestrian safety in Austin, Texas, aiming to inform better urban planning and traffic safety strategies.
2. Methods
Austin, Texas was chosen as the study area due to its rapid urban growth, diverse streetscape environments, and various urban development patterns. Street-level data was obtained from the Texas Department of Transportation (TxDOT). The unit of analysis is street segment. To account for road geometry variability, arterial roads were divided into unequal segments based on the stretch between two intersections. This method ensured each segment had consistent geometric characteristics, minimizing bias in the analysis. A total of 923 segments were selected, with an average length of 0.61 kilometres (0.38 miles) (standard deviation of 0.63 kilometres [0.39miles]) and a range from 0.09 to 6.15 kilometres (0.06 to 3.82 miles). The study analyzed three years of crash data (2018-2020) from TxDOT, focusing on mid-block crashes to assess the association between land use and crash occurrences along the segments. The focus on mid-block pedestrian crashes is due to the distinct risk factors and characteristics of these locations, which differ from intersections. Mid-block areas often lack traffic control devices and involve less predictable pedestrian behavior, leading to unique interactions between pedestrians and vehicles. This study excluded those pedestrian-vehicle crashes occurred within 50-meter buffer from the intersections of two arterials since a previous study has used a 50-meter buffer to explore the effects of characteristics within close proximity to the intersection on crashes (Miranda-Moreno, Morency, and El-Geneidy 2011).
The dependent variables were pedestrian-vehicle crashes categorized by injury severity (fatal and injurious). This study excluded the no-injury category, as most of such crashes are typically unreported. 677 pedestrian-vehicle crashes were recorded along Austin’s urban arterials (Table 1). The crash data showed over-dispersion and fit a negative binomial distribution (Table 2).
Table 3 details these variables, including their measures, data sources, time periods, and descriptive statistics. The dependent variables were pedestrian-vehicle crashes by injury severity (fatal and injurious). Four independent variable domains were considered—traffic/pedestrian exposure, road geometry, surrounding environment, and streetscape—based on existing literature. To accurately capture the surrounding environment, 30.48-meter (100-foot) buffers were created around each arterial segment. This buffer size was chosen based on design standards from the Federal Highway Administration (Texas Department of Transportation, 2013), its adequacy in encompassing nearby land uses, and its ability to minimize overlap and spatial autocorrelation.
This study evaluated the streetscape environments using a computer vision approach powered by machine learning algorithms and Google Street View (GSV) images. Deep neural network-based semantic segmentation models were employed to extract information from the vast GSV image data (Kwon and Cho 2020; Wang et al. 2016). DeepLabv3 semantic segmentation model was used to analyze GSV images, extracting streetscape features like sidewalks, greenery, and road surfaces. This computer vision approach, powered by convolutional neural networks (CNNs), allowed for a detailed analysis of how these streetscape elements relate to pedestrian-vehicle crashes. Points were generated every 20 meters along urban arterials, and 215,988 GSV panorama images were retrieved via the GSV API, focusing on those captured between 2018 and 2020. Ultimately, 174,867 GSV images were utilized to analyze visual streetscape environments.
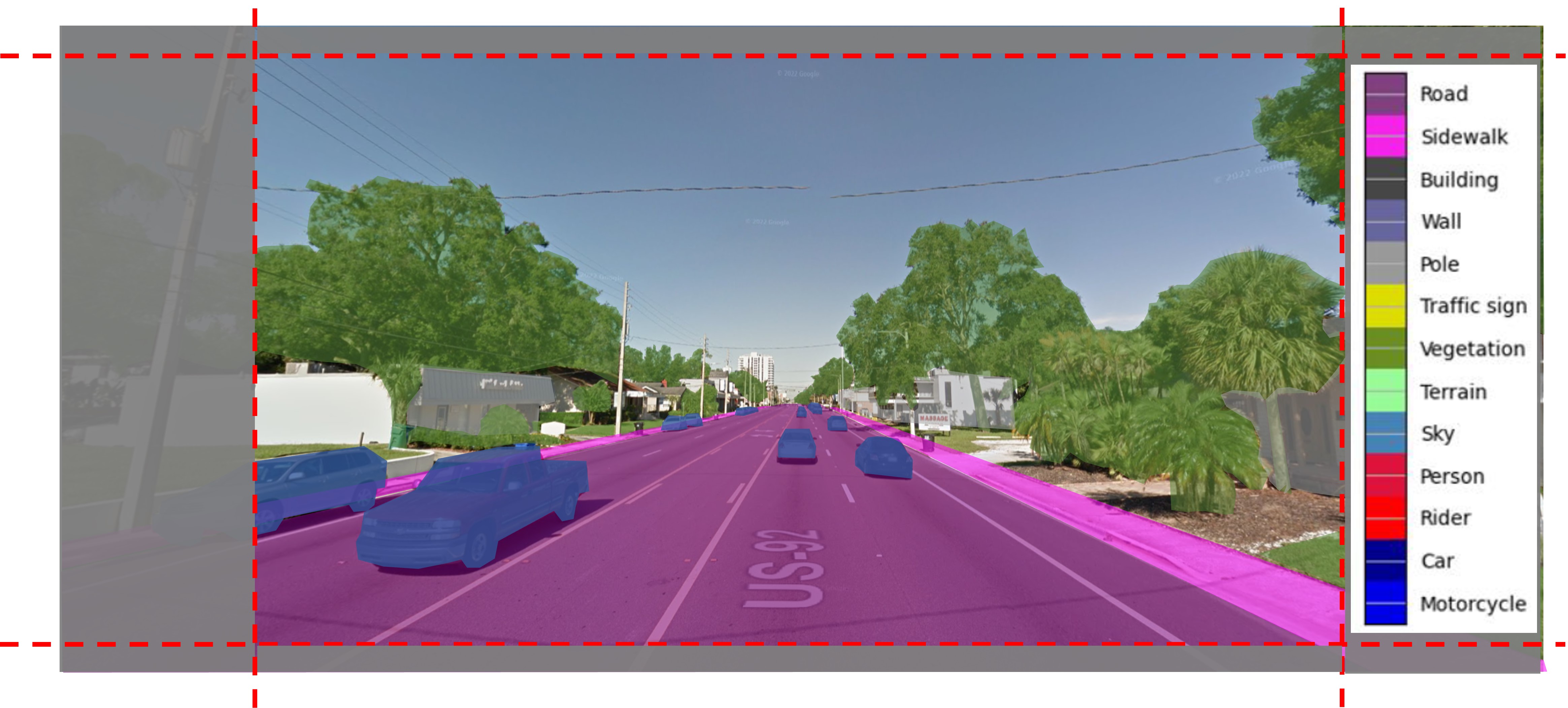
GSV panorama images offer a 360° view but have edge distortions that can cause inaccuracies (Yin and Wang 2016). To improve accuracy, the study focused on the central portion with minimal distortion (Kim and Woo 2022) and trimmed the distorted segments based on established methods, processing the corrected images into study variables using a semantic segmentation approach (Figure 1).
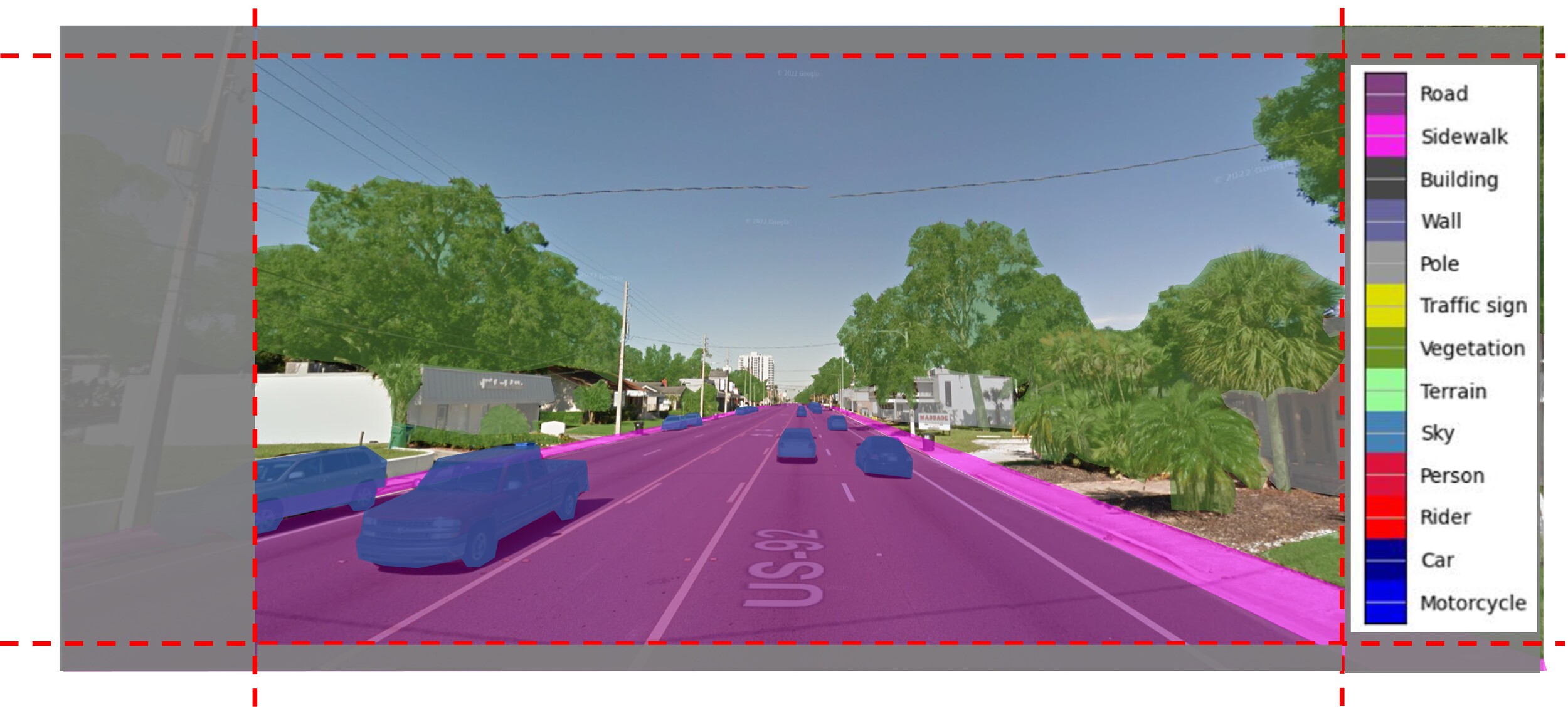
The Deeplab V3+ model, trained on the Cityscapes dataset, achieved a validation accuracy of 0.825 in identifying street-level landscape features (Xia, Yabuki, and Fukuda 2021). The model analyzed GSV images to identify elements such as roadways, sidewalks, greenery, sky, and more, focusing on greenery, sidewalk pavement, and outdoor openness. Categories like persons, vehicles, and buildings were excluded due to their transient nature and potential for data skew, as well as multicollinearity concerns (Zhanjun et al. 2022). Emphasizing greenery, sidewalk pavement, and openness is crucial for understanding their relationship with pedestrian safety: greenery enhances aesthetics and visibility, sidewalks reduce fall risks, and openness improves sightlines, decreasing potential hazards (Jeon and Woo 2023). The study averaged these variables across street segments to evaluate their effects on pedestrian safety.
Negative binomial models were used to address over-dispersed dependent variables (Ukkusuri et al. 2012). Four models were developed to explore the relationships between independent variables and the counts of total, fatal, injurious, and no-injury pedestrian-vehicle crashes. Correlation tests and Variance inflation factors (VIF) checked for multicollinearity, with all analyses conducted in Stata 12.0.
3. Findings
Table 4 displays the coefficients from the negative binomial models predicting total, fatal, and injurious pedestrian-vehicle crashes. It shows the relationship between four independent variable domains and pedestrian-vehicle crashes by injury severity (fatal and injurious), respectively.
Driveway, transit Stop, and land use
The number of driveways was significantly associated with total and injurious pedestrian crashes, aligning with prior research that identifies driveways as high-conflict zones and potential hotspots for pedestrian-vehicle crashes (Gattis et al. 2013). Commercial and office uses were identified as significant land use variables related to pedestrian collisions. They attract more vehicle and pedestrian traffic, increasing crash risks at driveway access points (Yu and Zhu 2016). Commercial sites near arterial roads with high vehicle accessibility may cause conflicts due to speed differences between vehicles on the road and those entering or exiting the commercial area. This can lead to insufficient time for drivers to decelerate or accelerate, raising crash risks. A 1% increase in transit stop density was associated with 0.4%, 0.4%, and 0.5% increases in total, fatal, and injurious pedestrian-vehicle crashes, respectively. Transit stops, as focal points for pedestrian activity, may expose users to heavy traffic, particularly on urban arterials (Cinnamon, Schuurman, and Hameed 2011).
Streetscape Environments
The presence of sidewalk pavement was found to be negatively associated with total, fatal, and injurious pedestrian-vehicle crashes, indicating that sidewalks help reduce crash occurrences by keeping pedestrians separated from traffic. Streets with higher percentages of greenery were also linked to fewer total and fatal pedestrian-vehicle crashes. Greenery, such as trees and shrubs, can calm traffic by creating a narrower visual corridor or signaling to drivers that they are in residential or recreational areas where caution is needed (Chiang et al. 2022).
A limitation of this study is the use of the DeepLabv3 model, which achieved a validation score of 0.825. While generally good, this suggests about 17.5% of streetscape features may have been misclassified, potentially introducing uncertainty into the analysis. Future studies should improve model accuracy or use manual verification to enhance the reliability of the findings.