1. Questions
Although there exists research on the acceptance of autonomous vehicles on public roads (Kaye et al. 2021; Pascale et al. 2021), prospect theory has yet to be applied on the field. Prospect theory has two central claims (Kahneman and Tversky 1979; Tversky and Kahneman 1992). Firstly, humans evaluate losses as more impactful than gains. Losing a life in a traffic accident feels more impactful than saving a life. This phenomenon is called loss aversion. Secondly, humans evaluate gains or losses according to the current situation. Being informed that 1 person has died in a traffic accident feels more impactful than receiving corrective information that 6 and not 5 people died in the same accident. Even though both situations inform that one more life has been lost, humans experience them differently emotionally. This is often called diminishing sensitivity.
Early research on loss aversion estimated that losses are 2.25 as impactful as gains (Tversky and Kahneman 1992). However, newer research on loss aversion finds considerable variations (Walasek, Mullett, and Stewart 2018), with the average loss aversion coefficient at a much more conservative 1.31. Other studies investigating human choice behaviour in programming autonomous vehicles found no effect of loss aversion (Luzuriaga, Heras, and Kunze 2019). Thus, whether prospect theory plays a role in the acceptance of autonomous vehicles on public roads remains uncertain. Studies on this will help assess publicly acceptable safety levels for automated vehicles, and further explore the cognitive mechanisms of prospect theory. Furthermore, it could help future studies explore other aspects of prospect theory such as decision weights and probability distortion on other topics such as economic costs and environmental benefits. Therefore, this study investigates if the acceptance of autonomous vehicles on public roads as a function of changes in traffic jams and injuries is subject to loss aversion and diminishing sensitivity.
2. Methods
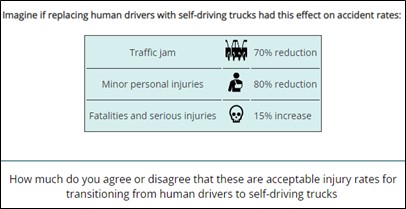
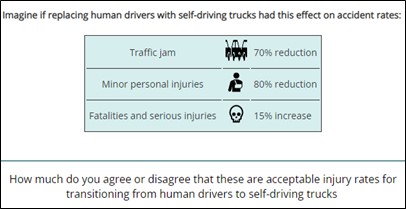
We distributed a survey on how acceptable some changes in different traffic incidence rates were as a consequence of replacing human drivers in trucks. Each respondent rated the acceptability of 5 scenarios. We give an example of the item in Figure 1 below. See the supplementary information on limitations for the problematic question phrasing. All numbers for traffic jams and injury rates were completely randomized from -100% to +100% on 5-point intervals. Responses were collected on a scale from 1 to 7, ranging from completely disagree to completely agree. For more background on the item, see “Survey item creation” in the supplementary information.
Participants were recruited through paid ads on Facebook and Linkedin. The full statistical script describing our analysis, as well as a minimized dataset, is available as supplementary information. The original dataset had 447 responses. Responses completed in under one minute were deemed too quick for realistic item comprehension and removed (n = 1). Responses with identical answers across all scenarios were removed (n = 116). Responses with incongruent accept (supporting worsening of all conditions; n = 18), or disproval (disproved of improvement of all conditions; n = 47) were removed. In this dataset, respondents answered “I don’t know” to 68 items. This final dataset had 1583 scenario responses across 330 participants. Mean time to complete the full survey was 8.3 minutes (SD = 9.9). For data validation, see the supplementary information.
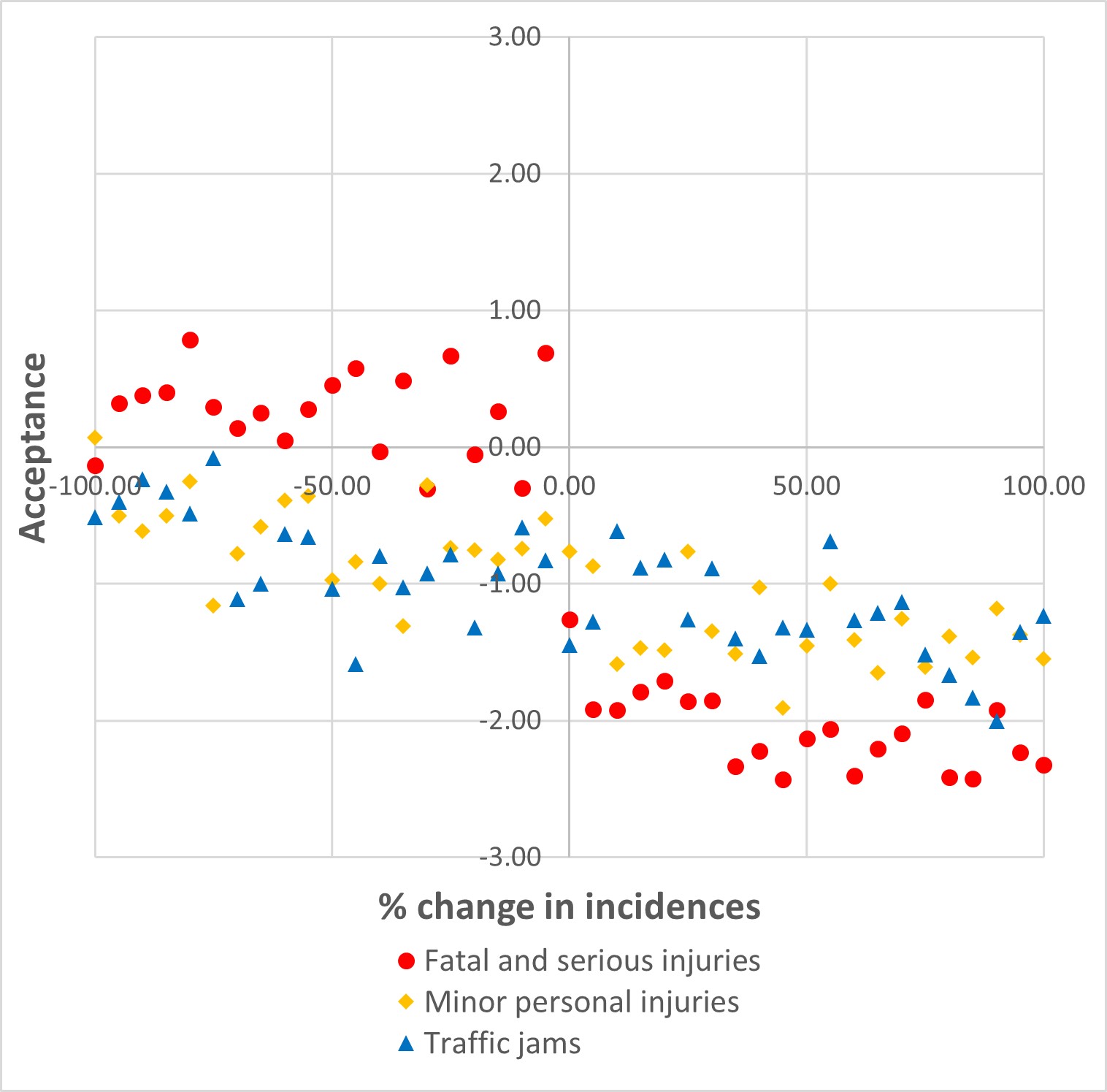
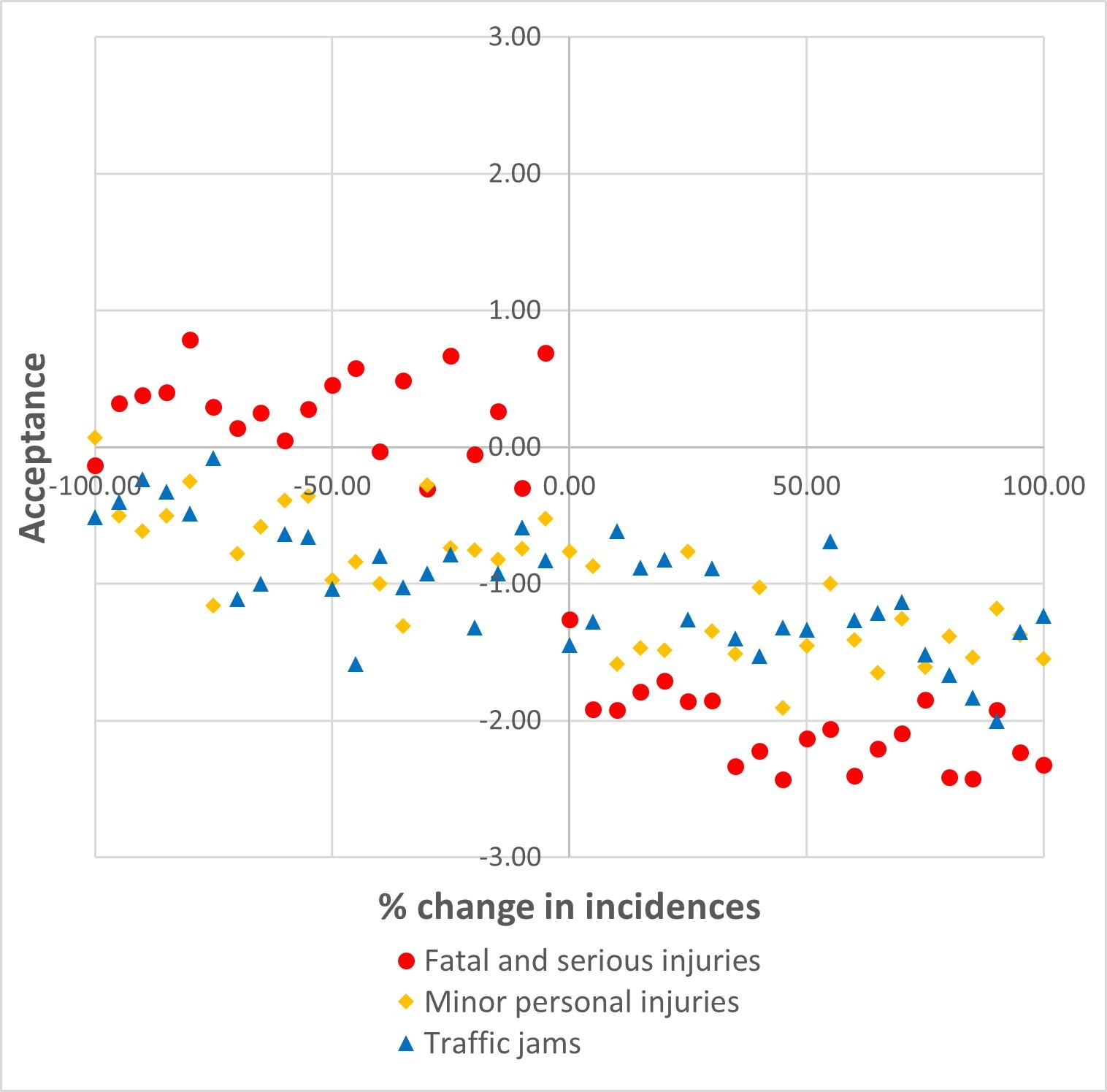
To show the average acceptance of the introduction of autonomous vehicles on public roads, and find a suitable curve for the diminishing sensitivity, we present the mean acceptance across all traffic jam and injury rates below in Figure 2. The curvilinear relationship between acceptance and the factors could said to best fit a logarithmic curve, with a sharp drop in acceptance when the factors pass 0.
Because acceptance responses were grouped by participants, we analyzed the data with multilevel regression models, using respondent as the level 2 variable. As the goal of our analysis is to investigate if aspects of prospect theory apply to the acceptance of road traffic outcomes of autonomous vehicles, we analyzed the data using four different models where we gradually incorporated aspects of prospect theory. If the integrated aspects do not meaningfully increase the explained variance, this indicates that the aspect does not apply, and vice versa.
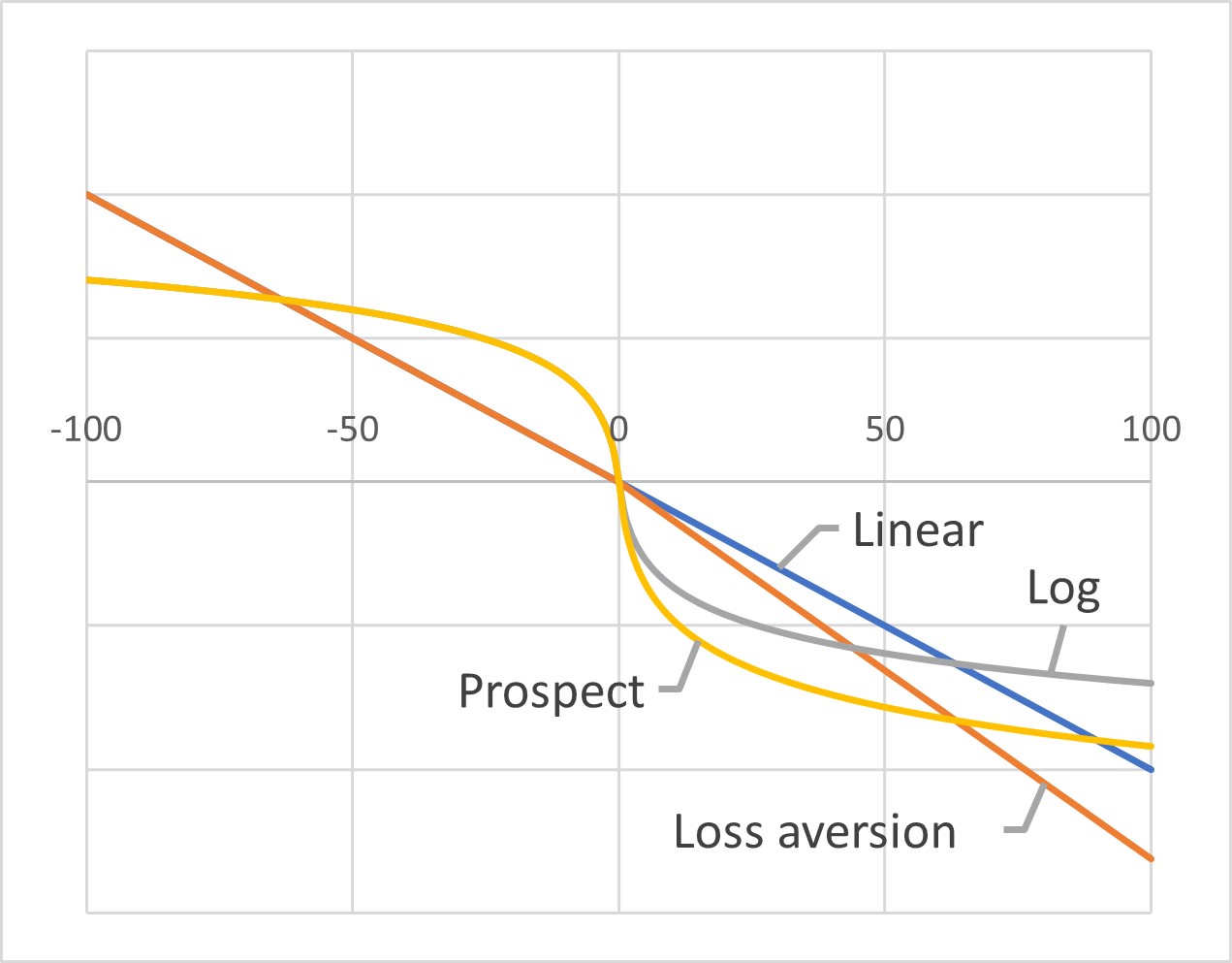
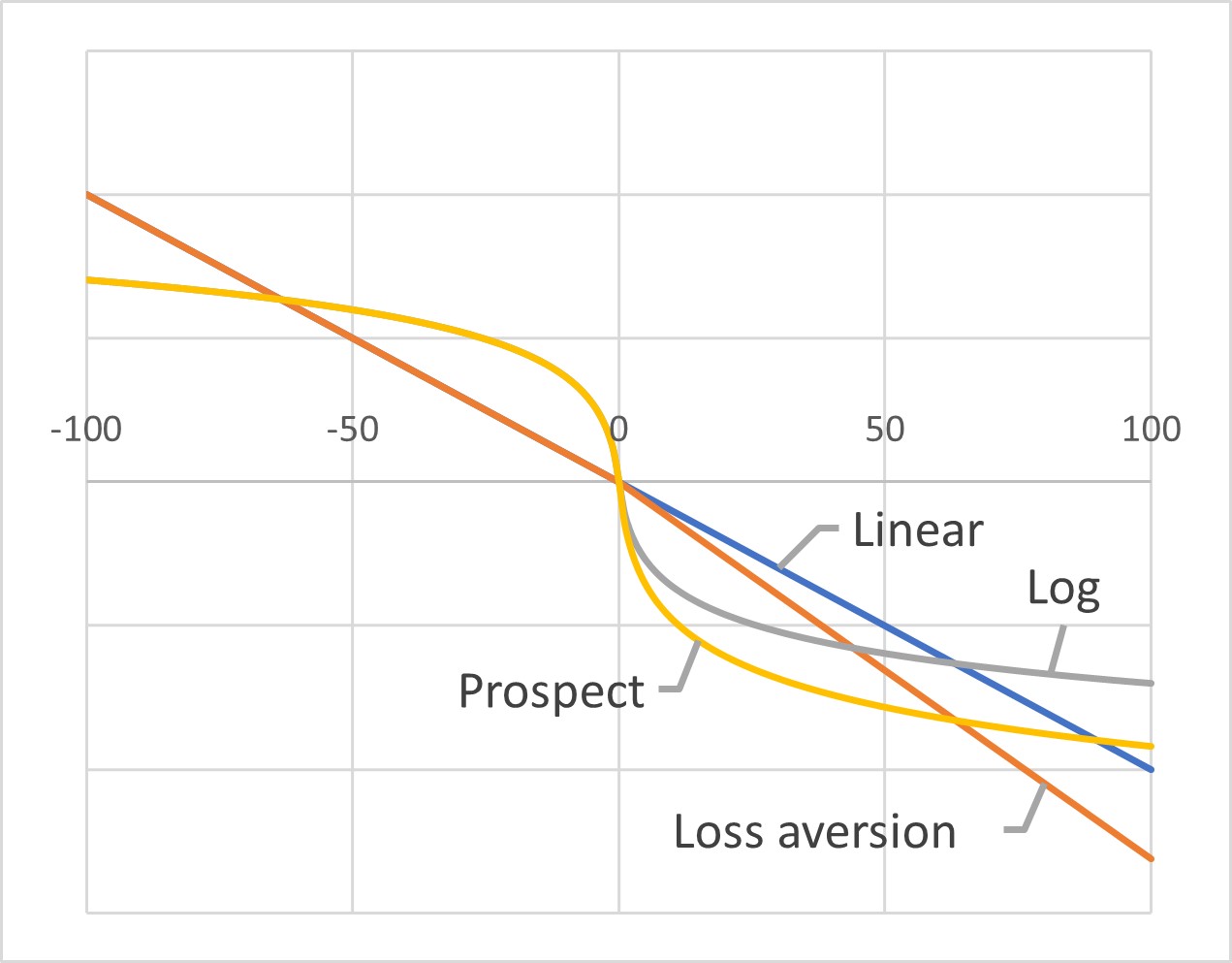
The first model, “linear” does not correct for loss aversion or diminishing sensitivity. The second model, “loss aversion”, accounts for a loss aversion of 1.31 (from Walasek, Mullett, and Stewart 2018) by multiplying all traffic jam and injury estimates larger than 0 by 1.31. Here, we assume the acceptance data is already affected by loss aversion, and by applying loss aversion to the traffic jams and injury rates, this creates a linear trend. This trend should be observed by a marked increase in the model fit, where a linear trend in the data will produce a higher R2. The third model, “log”, accounts for diminishing sensitivity by replacing the absolute value of the scenario numbers +1 with the natural log, and inversing it if the original was less than 0. If the original scenario number was 0, it remained at 0. This way, the acceptance change for a shift from 0 to 5% equals the shift from 5 to 35%. Again, we test if this trend is already applied to the acceptance data by applying it to the traffic jam and injury data. If it is, the two logs will create a linear trend that will be reflected by a higher model R2. The fourth model, “prospect”, combines the two latter models. Figure 3 shows the curve of the four models. We calculate R2 by comparing the residual level-1 variance to the residual level-1 variance in an empty model (Mehmetoglu and Jakobsen 2022).
3. Findings
Changes in traffic jams, minor injuries, and major and fatal injuries have a statistically significant and meaningful impact on the acceptance of autonomous trucks on public roads. There is no meaningful change in explained variance when the model accounts for loss aversion. There is a considerable increase in the explained variance of acceptance when modelling the log of variables instead of the original number. For a discussion of the surprisingly low mean acceptance, see the supplementary information.
Our study supports the notion that the natural logarithmic of change could be a better predictor of acceptance of that change, than the original number. The acceptance change from 0% to 10% seems to be considerably larger than the acceptance change from 50% to 60%. Thus, the concept of diminishing sensitivity applies. The lack of increased explained variance in the models accounting for loss aversion suggests that loss aversion does not apply to traffic jams and injuries impact on acceptance of autonomous vehicles on public roads.
Declarations of interest
None.
Acknowledgements
The data was collected with funding from the EU project MODI, project ID 101076810 (https://modiproject.eu/about/), call HORIZON-CL5-2022-D6-01, and later analysed with internal funds from The Institute of Transport Economics (TØI). Views and opinions expressed are those of the author only and do not necessarily reflect those of the European Union or CINEA. Neither the European Union nor the granting authority can be held responsible for them.